
Les moteur pas à pas sont des moteurs fait pour la précision, il sont très simple d’utilisation et peux onéreux. Maitriser ce type de moteur vous permettra de construire de nombreuse machine automatisé, cnc et autres.
Pour ce tuto nous parlerons uniquement des moteurs pas à pas bipolaire. J’utilise des NEMA 17.
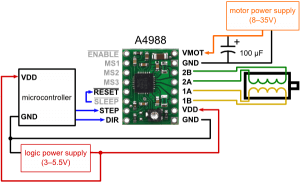
Ces moteurs ont 4 fils donc 2 bobines. On peut le voir sur le schéma du driver. Le moteur tourne d’un pas après l’autre, le driver se charge donc d’alimenter les bobines alternativement pour le faire avancer sans interruption. Il sont très précis car grâce à ce système vous pouvez le faire tourner uniquement d’un pas, le moteur que j’ai choisit à un pas de 0.9°.

Comment cialis prix piloter ces moteurs ?
Avec cette petite carte électronique on peut piloter le moteur directement via le port GPIO d’une raspberry mais la puissance fournit par la Raspberry est bien trop faible. Le driver est la pour sa, il faudra donc l’alimenter pour qu’il puisse retransmettre la puissance nécessaire au bobine du moteur.
On peut voir sur le schéma que le pilotage ce fait par microcontrôleur via des sortit tout ou rien cependant nous utiliserons les pins GPIO de la Raspberry. Voyons les différentes entrées du driver :
- enable : Il y a une barre dessus dons l’entrée est active quand il n’y a pas de courant.
- MS1, MS2 et MS3 sont la pour définir la vitesse de rotation
MS1 MS2 MS3 Microstep Resolution Low Low Low Full step High Low Low Half step Low High Low Quarter step High High Low Eighth step High High High Sixteenth step - Reset
- Sleep
- Step : chaque impulsion fera tourner d’un pas le moteur
- Dir : Choisit le sens de rotation
Donc en reliant les pins comme sur le schéma ci dessus vous n’avez plus qua dire a votre raspberry la directions a choisir et a envoyer des impulsions pour faire tourner le moteur.
Pour conclure voyons le programme qui pilotera le port GPIO.